Northwest University
Radio Map based UAV Application Research Group
Radio Map based UAV Application
Static Target Search
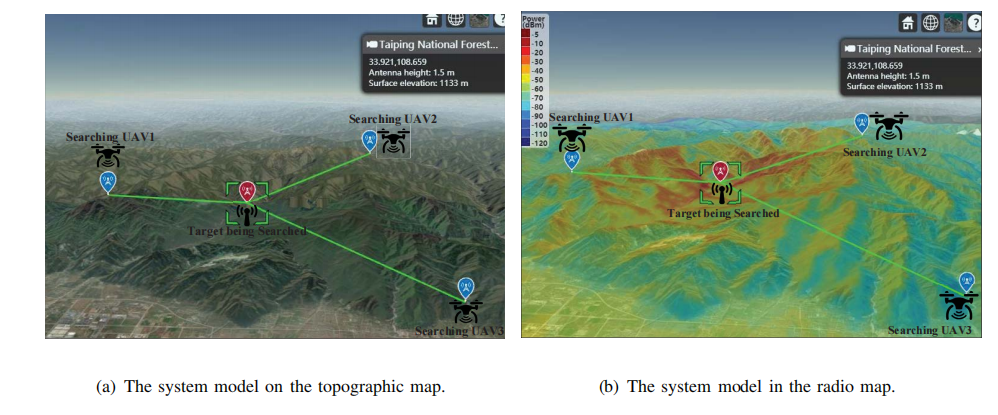
The UAV designs a minimum mean square error (MMSE) estimator based on the received signal strength (RSS) map of a static target to achieve precise localization.
Dynamic Object Tracking
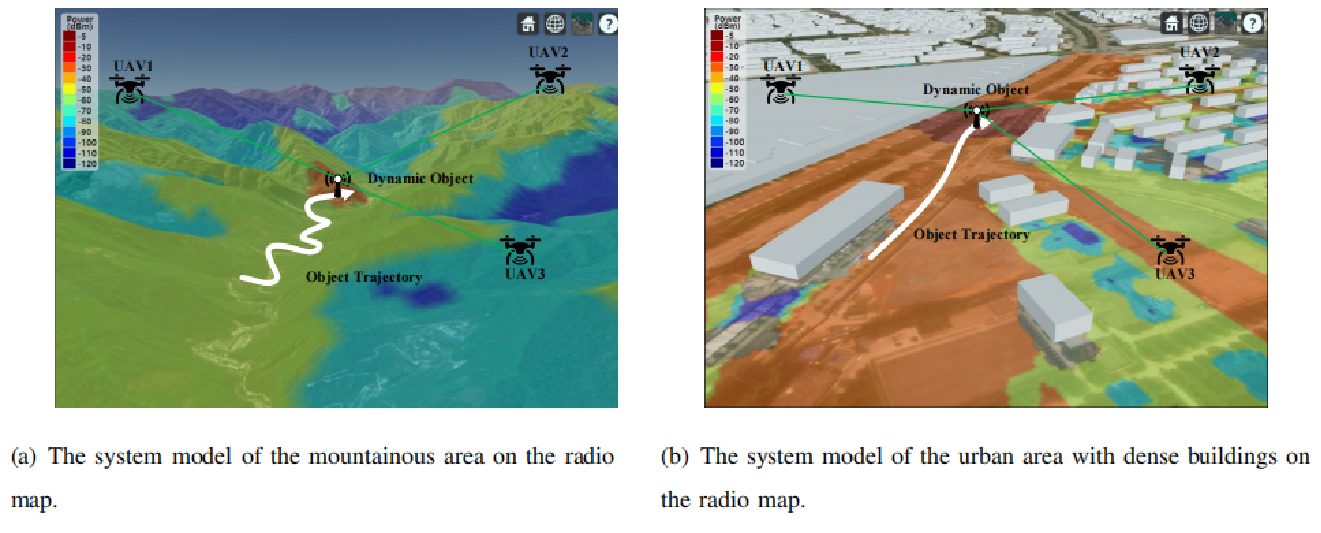
For dynamic target tracking, the UAV constructs a time-varying RSS map using the signal strength received from the moving target, enabling real-time positioning of the dynamic target.
UAV Path Planning
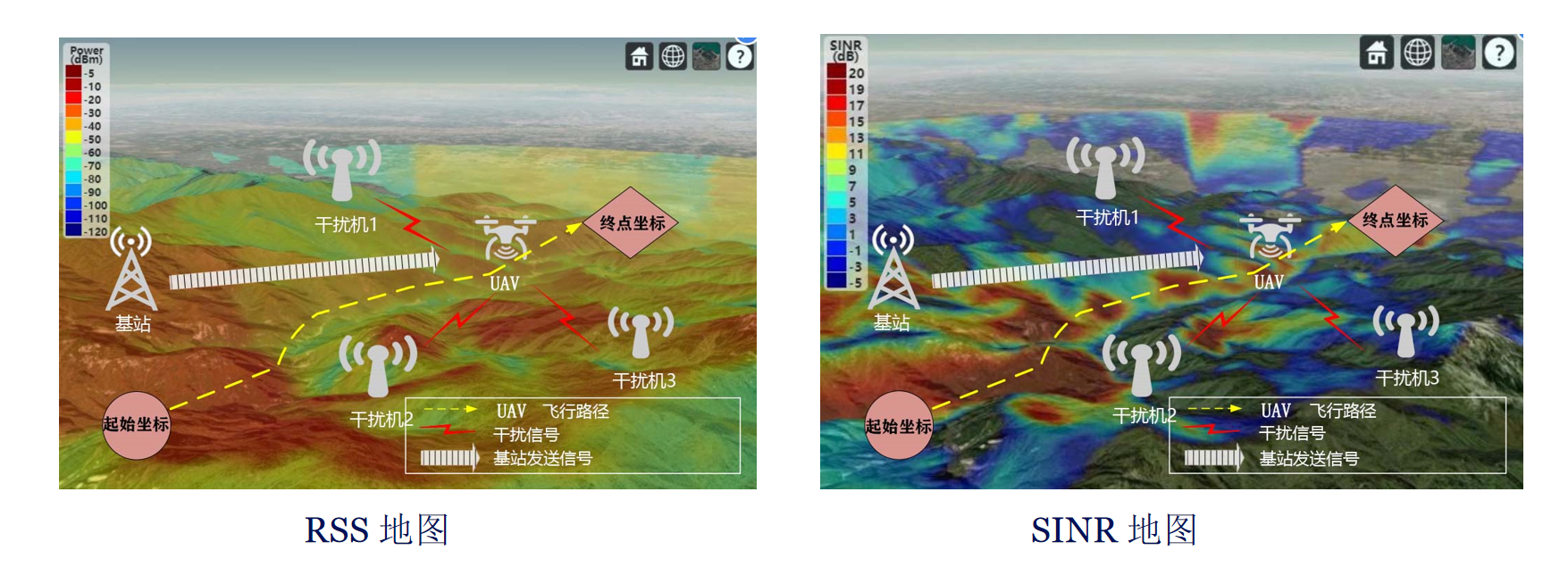
The UAV optimizes its trajectory by constructing both RSS and SINR maps, which assist in interference-avoidant path planning.
Networking In Air-to-Ground Communications
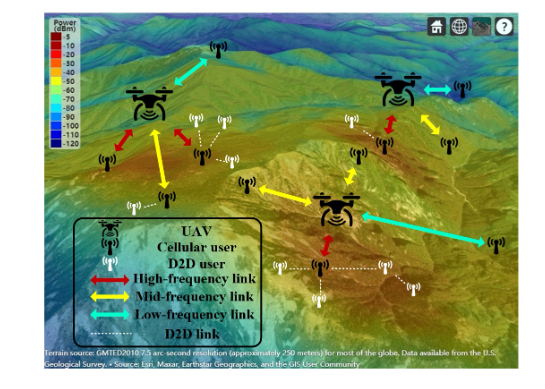
Air-to-Ground Network Topology: The UAV optimizes its position relative to the ground network to bridge ground-based D2D sub-networks, thereby maximizing throughput.
UAV Trajectory Planning
This paper introduces a dual-threshold UAV trajectory planning method that enhances energy efficiency through demand-based position updates.